
Sangoh Lee.이상오
Ph.D. @ POSTECH GSAI · advisor Wook-Shin Han · lab Data Systems
01about
Ph.D. student at POSTECH GSAI, working with Prof. Wook-Shin Han in the Data Systems Lab. Research focuses on Physical AI, Vision-Language-Action models, and World Models. I believe physical intelligence will be the next major leap in AI.
Previously: Natural Language Processing, Knowledge Graph Question Answering, and AI for Databases — publications at ACM SIGMOD 2024 and EMNLP 2025.
02interests
03news
- May 2026NewVAP paper is accepted to ICML 2026 🎉
- Jan 2026Received the BK21 Best Paper Award (Semi-Grand Prize) from POSTECH GSAI for SAFE.
- Dec 2025Preprint on Visual Attentive Prompting (VAP) for personalizing VLAs is now on arXiv. [arXiv] [project]
- Nov 2025SAFE accepted to EMNLP 2025 main track (Suzhou, China).
- Jun 2024ASM and ASM in Action accepted to ACM SIGMOD 2024.
- Jul 2023Awarded the SBS Cultural Foundation Scholarship (≈75,000 USD).
- May 2023Awarded the Postechian Fellowship for the highest grades entering POSTECH GSAI.
- Feb 2023Started Ph.D. at POSTECH GSAI in the Data Systems Lab.
04publications
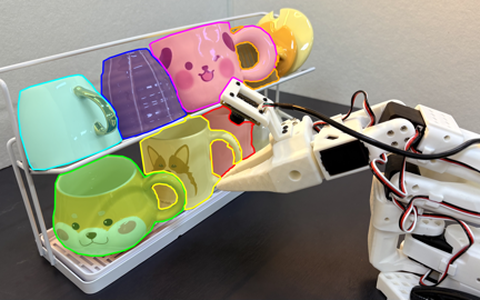
Bring My Cup! Personalizing Vision-Language-Action Models with Visual Attentive Prompting
Sangoh Lee, Sangwoo Mo, Wook-Shin Han
A training-free perceptual adapter that gives frozen VLAs top-down selective attention — personalized object manipulation from a few reference images.
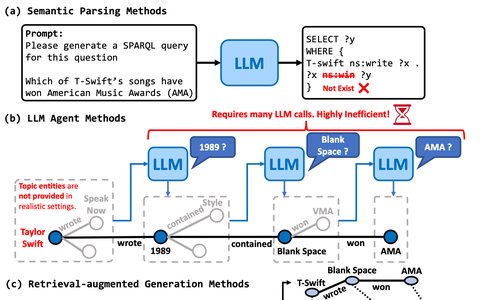
SAFE: Schema-Driven Approximate Distance Join for Efficient Knowledge Graph Querying
Sangoh Lee, Sungho Park, Wook-Shin Han
A schema-driven framework for robust query graph generation and efficient KG retrieval, combining an Approximate Distance Join algorithm with compact schema graphs.
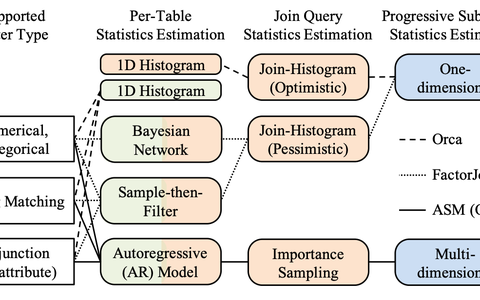
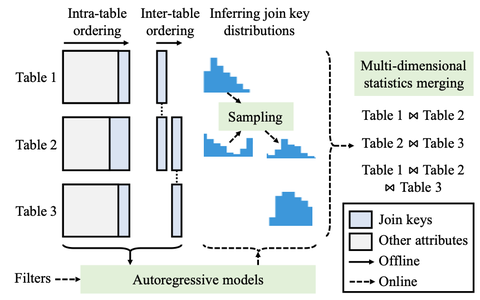
ASM: Harmonizing Autoregressive Model, Sampling, and Multi-dimensional Statistics Merging for Cardinality Estimation
Kyoungmin Kim, Sangoh Lee, Injung Kim, Wook-Shin Han
A learned cardinality estimator combining autoregressive models, sampling-based join merging, and multi-dimensional statistics merging.
ASM in Action: Fast and Practical Learned Cardinality Estimation
Sangoh Lee, Kyoungmin Kim, Wook-Shin Han
A demonstration of ASM's internal estimation process and plan-space exploration, showcasing end-to-end execution-time advantages.
-
ICMLBring My Cup! Personalizing Vision-Language-Action Models with Visual Attentive PromptingSangoh Lee, Sangwoo Mo, Wook-Shin Han
-
EMNLPSAFE: Schema-Driven Approximate Distance Join for Efficient Knowledge Graph QueryingSangoh Lee, Sungho Park, Wook-Shin Han
-
SIGMODASM: Harmonizing Autoregressive Model, Sampling, and Multi-dimensional Statistics Merging for Cardinality EstimationKyoungmin Kim, Sangoh Lee, Injung Kim, Wook-Shin Han
-
SIGMOD demoASM in Action: Fast and Practical Learned Cardinality EstimationSangoh Lee, Kyoungmin Kim, Wook-Shin Han
05ongoing
06notes & posts
07cvpdf ↗
Education
- 2023 –Ph.D. in AIPOSTECH GSAI · Wook-Shin Han · GPA 4.27/4.30
- 2019 – 23B.S. in EEPOSTECH · Salutatorian (2/256) · GPA 4.25/4.30
- 2017 – 19Daegu Il Science HSDG1S
Experience
- '22 – '23Research InternPOSTECH Data Systems Lab · sampling-based cardinality estimation
Teaching
- 2025 –TA · Deep Learning (AIGS538)
- 2023TA · Database Systems (CSED421)
- '20 – '22Tutor · Calculus, Linear Algebra
08honors & awards
- 2026BK21 Best Paper Award (Semi-Grand Prize), POSTECH GSAI
- 2023SBS Cultural Foundation Scholarship (≈ 75,000 USD)
- 2023Postechian Fellowship (highest grades entering POSTECH GSAI)
- 2023Kwanjeong Scholarship (declined in favor of SBS)
- 2023Awards of Proud Postechian Member with the Highest Honor
- 2023Newcomb Lim Ki-Hong Design Project Best Award (POSTECH EE)
- 2022KEC Science Education Foundation Scholarship
- 2022Awards of Korea Military Academy Principal (ROND program)
- 2021National Science and Technology Scholarship